안녕하세요!! 드린이입니다 ::))
오늘은 드론 입문자 혹은 초심자를 위한 드론의 비행 원리 30탄입니다. 30탄에서는 지난 포스팅에 이어 멀티콥터가 공중에 떠있을 수 있는 원리와 이유에 대한 내용을 포스팅하겠습니다.
본격적인 포스팅에 앞서 헬리콥터와 멀티콥터에서 프로펠러를 이용하여 양력을 발생시키는 원리를 이해하기 위해 기본적으로 알아두면 좋은 몇 가지 용어에 대한 설명부터 시작하겠습니다.
원판(Disk)

원판은 프로펠러가 전진운동 없이 1회전으로 그려내는 원형 평면을 의미합니다.
피치각(Pitch Angle)
피치각은 시위선과 원판이 이루는 각으로, 뿌리부에서는 90도에 가까운 큰 각에서부터 끝단으로 갈수록 작은 각으로 변화합니다.
피치(Pitch)
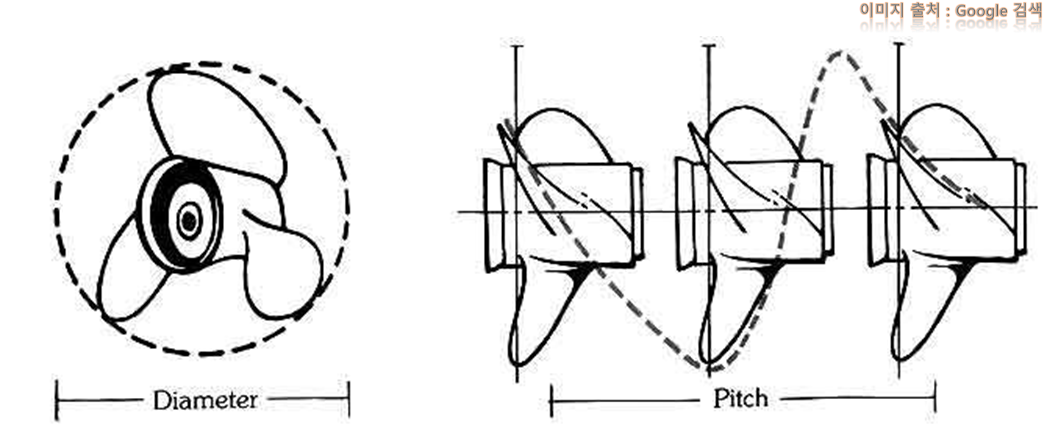
피치는 프로펠러가 1회전하는 동안 나선형의 경로를 따라 진행하는 거리를 의미합니다.
프로펠러 깃 끝 속도
깃 끝의 속도가 음속에 가깝게 되면 공기의 압축성 영향을 받아 깃 끝 근처에서 실속이 발생하게 되는데 이런 현상을 방지하기 위하여 깃 끝 속도를 음속의 90% 이하로 제한하는 것이 보통입니다. 또, 날개깃 숫자에 따른 프로펠러를 2엽, 3엽, 4엽 그리고 6엽으로 분류합니다.
토크(Torque) 작용

토크는 물체를 회전시키는 효력을 나타내는 물리량으로 힘과 받침점까지의 거리의 곱이며 국제적인 표시단위는 N·m(뉴턴미터)입니다. 헬리콥터는 블레이드(Blade) 회전에 의해 양력 발생하고 블레이드는 시계반대 방향으로 회전하기 때문에 동체는 뉴턴의 제3 법칙 작용과 반작용의 법칙에 의해 회전익 블레이드 회전방향에 반대로 회전하려는 경향 즉, 시계방향으로 돌아가려고 하는데 이 현상을 회전익 헬리콥터의 토크(Torque) 작용이라고 합니다.

멀티콥터도 헬리콥터와 마찬가지로 프로펠러가 회전하는 물체이기 때문에 토크가 당연히 발생하게 됩니다.. 회전익 비행체에서 토크의 힘을 견제하거나 제거하기 않는 한 비행을 할 수가 없습니다. 만약 토크의 힘을 제거하지 않는다면 동체가 회전하여 추락하게 될 것입니다.
제자리 비행(Hovering)의 원리

제자리 비행(Hovering)은 회전익 비행의 꽃이라고 불릴 만큼 중요한 비행 기술입니다. 제자리 배행은 한 지점에서 전후좌우 편류 없이 일정한 고도와 방향을 유지하면서 가만히 머무르는 비행을 의미합니다.. 이때 힘의 상태는 양력과 무게(중력)는(중력) 동일, 추력은 없으며 이에 따라서 항력이 적용되지 않는 상태입니다. 또 공기역학적인 힘이 균형을 이루어야 일정고도에 떠 있을 수 있고 프로펠러의 회전으로 발생하는 토크의 힘을 적절히 조절해 주어야 제자리 비행이 가능합니다.
공기의 흐름

제자리 비행 시 공기의 흐름은 무풍(wind calm)이라고 가정했을 때 제자리 비행 시 로터 블레이드는 상부의 공기를 끌어들여서 아래로 밀어내게 됩니다. 공기를 계속해서 밀어내면 밑으로 발생하는 하강풍의 속도를 증가시키게 되지만, 로터 블레이드의 끝단(blade tip)에서는 하강풍이 발생하지 않는 지역과의 마찰로 인하여 심한 블레이드 끝단 와류(blade tip vortex)가 발생합니다. 또, 로터 블레이드가 회전하면서 와류의 강도도 같이 강해지게 됩니다. 지면에 근접하여 지면효과를 받지 않는다면 제자리 비행 시 더 많은 동력이 필요합니다.
여기에서 블레이드 끝단 와류는 공기가 회전하는 로터의 끝단 주위에서 빙빙 도는 소용돌이 현상으로, 지면효과가 없는 제자리 비행보다는 세기가 작습니다. 또, 하강풍은 로터 회전면을 따라 위에서 아래로 흐르는 공기의 흐름(유도기류)으로 피치각이 커질수록 하강풍 역시나 증가합니다.
오늘의 포스팅을 마치도록 하겠습니다.
감사합니다::))